在近年来制造业人手不足和人工成本急剧上升的背景下,推动依赖人力的装配、检测、搬运等工序的自动化改造,正在成为当务之急。
尤其是在产品的装配工序中,必须对形状复杂的散装部件实施部件拣选,再送入自动设备。
该作业要求工人根据部件的交货形态和地点,判断部件的形状,取出部件并排放整齐。
这项作业的自动化,要求设备以与人同等的速度进行部件识别和灵活操作,因此始终难以得到推进。

特点:
在近年来制造业人手不足和人工成本急剧上升的背景下,推动依赖人力的装配、检测、搬运等工序的自动化改造,正在成为当务之急。
尤其是在产品的装配工序中,必须对形状复杂的散装部件实施部件拣选,再送入自动设备。
该作业要求工人根据部件的交货形态和地点,判断部件的形状,取出部件并排放整齐。
这项作业的自动化,要求设备以与人同等的速度进行部件识别和灵活操作,因此始终难以得到推进。
无需大幅改变生产现场布局,就能引入3D视觉传感器。
传统3D图像传感器体型较大,安装时要动用大型设备,仅依靠原有作业空间难以安装,必须大幅改变布局。
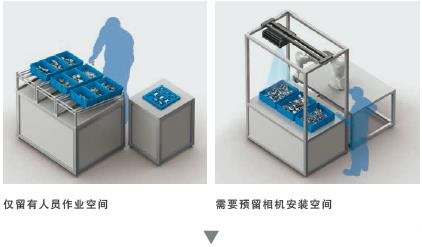
专为轻量级小型机械臂设计的3D视觉传感器,仅需与人相仿的安装空间。
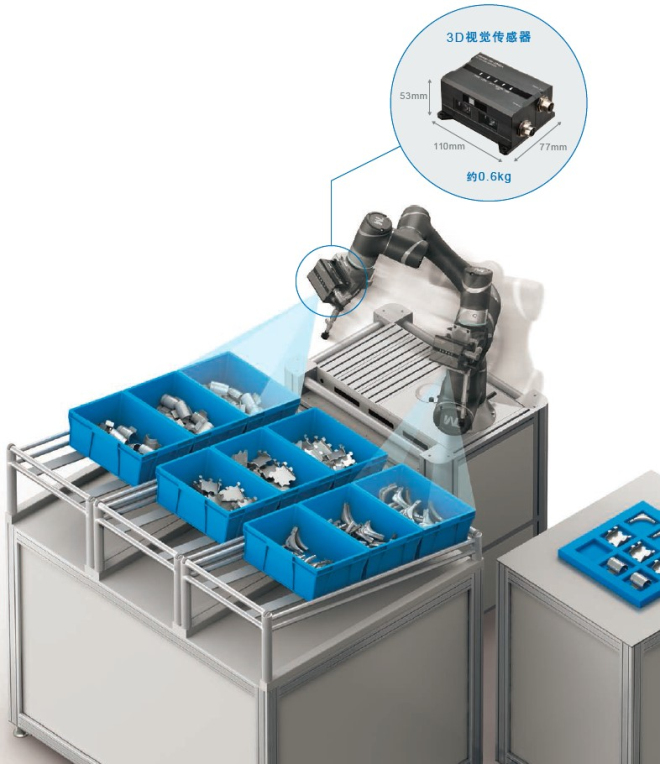
搭配机器人使用,可以拣选分散在托盘和货架上的部件,像人一样灵活。
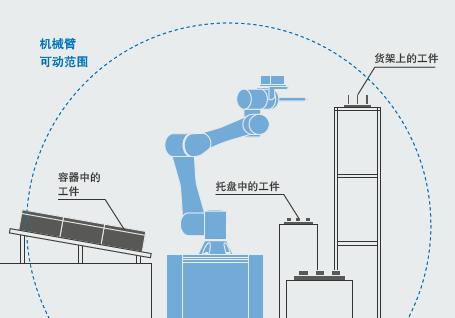
借助搭载3D视觉传感器的机械臂、协作机器人和移动工作站,这款拣选系统可根据作业地点,灵活地进行移动及布局调整。

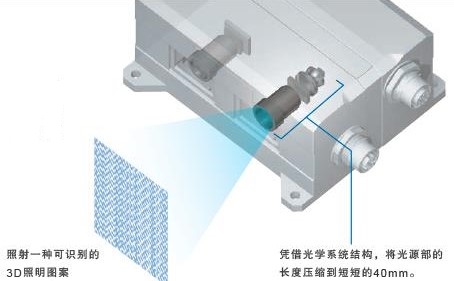
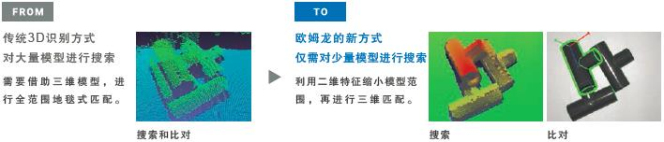
传统的相位差3D相机必须配备变换照明图案的投影结构,导致体积过大。欧姆龙的3D测量技术则借助勾勒精细图案纹样的光掩膜,缩短光路,成功实现了小型化。
凭借高水准的3D图像传感技术,实现了高速准确的部件识别。
借助可生成3D形状图像的3D测量技术以及识别对象姿态的3D识别技术,实现部件高速检测。
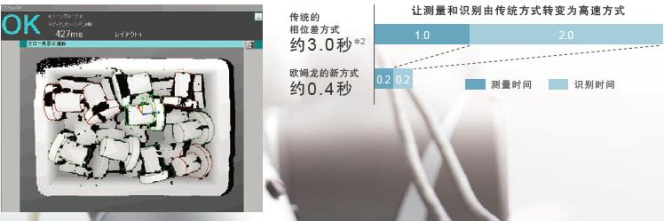
*1. 本公司指定条件下,3D测量和3D识别的合计时间。具体时间因对象而异。
*2. 在本公司指定条件下测得的参考时间。
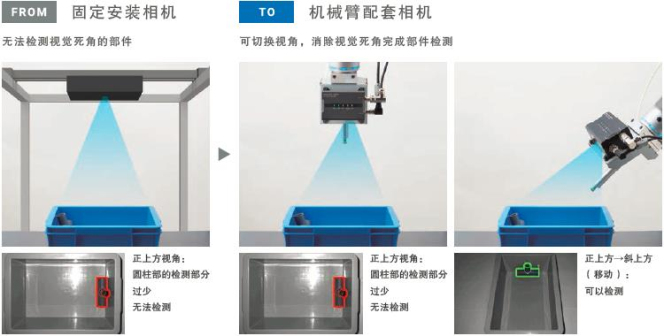
根据部件在箱体内部的位置,可能存在固定安装相机无法检测到的死角。因此,需要通过摇晃箱体等措施,令部件进入视野,造成设备尺寸变大、成本升高。采用机械臂配套相机,可在检测时切换视角,因此无需引大型设备,即可稳定检测部件。

*3. 日本发明专利,专利号:JP2018023606
*4. 中国发明专利,专利号:ZL201680042130.9
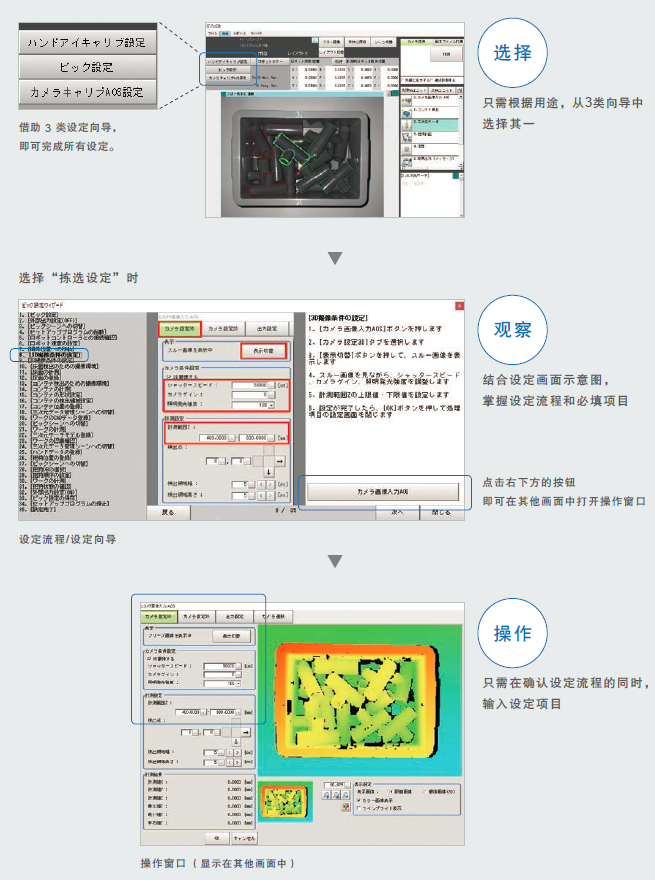
对于从相机设定到校准设定的一系列流程,只需利用向导菜单启动拣选应用,根据提示操作,即可完成应用设定。
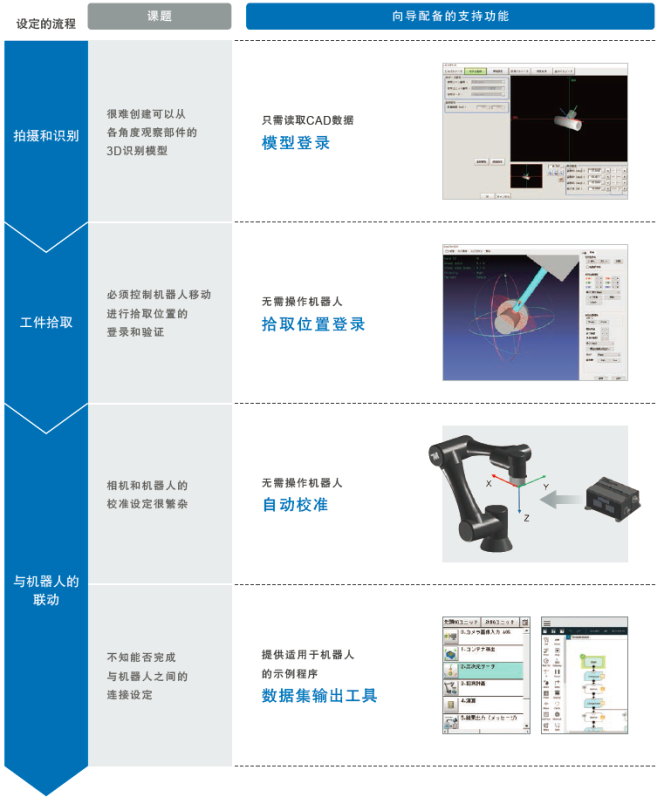
无需手册,即可根据向导提示,完成启动拣选应用所需的大约80项设定。
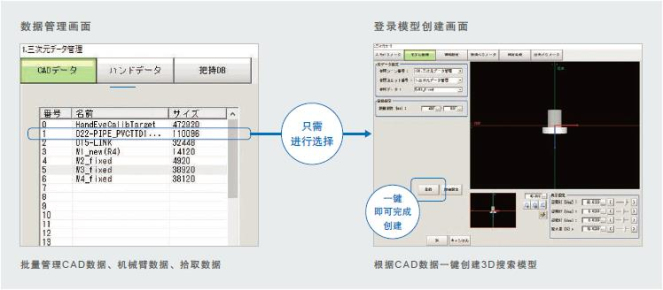
只需读取部件的CAD数据,就能自动创建3D搜索模型。
此外,部件的CAD数据、拾取点的设定数据以及各类机械臂的数据,均可实现全场景通用的批量管理。
如需添加品种,可直接复制场景数据,利用批量管理的CAD数据,创建新增品种的搜索模型。
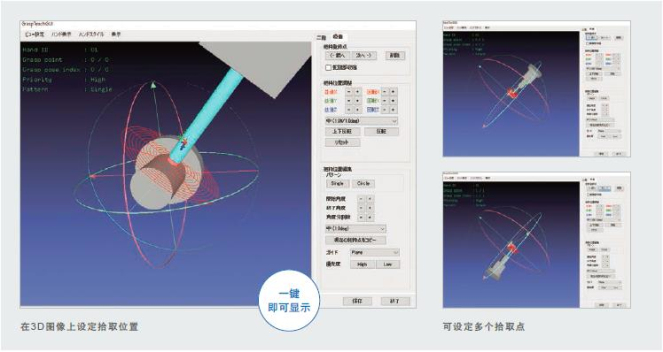
无需实际操作机器人,即可通过部件的CAD数据,设定拾取位置。
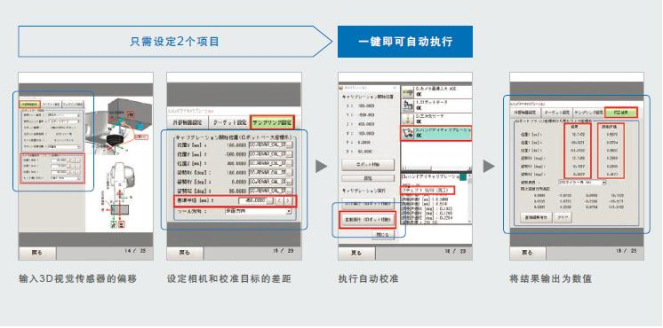
无需复杂设定,自动校准3D视觉传感器和机器人。
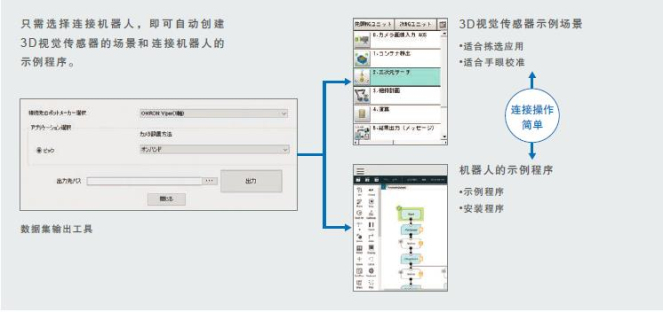
提供适用于连接机器人的示例场景、机器人连接程序。
购买产品后,只需注册会员,即可免费下载用于创建示例程序的数据集输出工具。
详情请见3D机器人视觉应用软件随附的会员注册表。
注. FH-5050-10、FH-5050-20除外。
* 可安装的传感器控制器为FH-5050(Ver.6.40以上)。
* FH传感器控制器需要为Ver.5.32以上。
连接触摸屏监视器和传感器控制器时,需要2根电缆,分别为图像信号电缆和操作信号电缆。
*1. 使用所有I/O信号时,需要2根电缆。
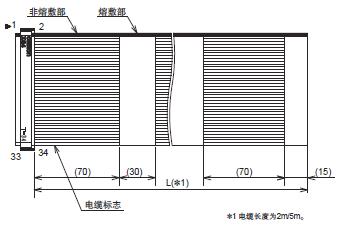
*2. 型号中的□内为电缆长度。2m=2、5m=5、15m=15
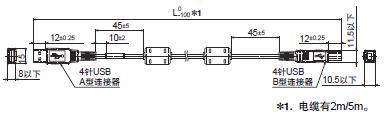
*3. 型号中的□□□内为电缆长度。0.5m=050、1m=100、1.5m=150、2m=200、3m=300、5m=500
*4. 型号中的□内为:J=十字螺丝型、E=一字螺丝型、P=推入型。
详情请参见连接器端子台转换单元XW2R系列产品样本(CDLJ-CN5-033)。
EtherCAT使用5类以上的STP电缆(铝带编织双重隔离带屏蔽双绞线电缆)。以直通配线使用。
EtherNet/IP使用5类以上的STP电缆(带屏蔽双绞线电缆)。直通/交叉配线均可使用。
*1. 小体积型的电缆长度备有0.2、0.3、0.5、1、1.5、2、3、5、7.5、10、15、20m。
牢固型两侧带连接器电缆(RJ45/RJ45)的长度备有0.3、0.5、1、2、3、5、10、15m。
详情请参见“工业用以太网连接器产品目录”(样本编号:CDJC-CN5-006)。
*2. 控制柜内配线用的Low Smoke Zero Halogen电缆。LSZH型采用单层隔离屏蔽结构,但已确认通信和干扰特性满足标准值。还备有适用于在控制柜外铺设的小体积型PUR电缆。
*3. 电缆颜色有绿色和蓝色可选。
*4. 详情请向本公司销售人员咨询。
*5. 电缆长度备有0.25~100m。请按照咨询方式咨询。
*1. 建议按以上组合使用电缆和RJ45连接器。
*2. 建议按以上组合使用电缆和RJ45组装式连接器。
| 外观 | 详情 | 型号 | |||
|---|---|---|---|---|---|
 | USB存储器 | 2GB | FZ-MEM2G | ||
| 8GB | FZ-MEM8G | ||||
 | SD卡 | 2GB | HMC-SD291 | ||
| 4GB | HMC-SD491 | ||||
 | USB切换器 | FZ-DU | |||
| — | 鼠标。推荐品。有线式、无需驱动型。 (不支持需要安装鼠标驱动程序的鼠标) | — | |||
 | EtherCAT 分支从站 | 3端口 | 电源电压: DC 20.4V~28.8V (DC24V -15%~ +20%) | 消耗电流:0.22A | GX-JC03 |
 | 6端口 | 消耗电流:0.22A | GX-JC06 | ||
 | EtherNet/IP、Ethernet 产业用交换式集线器 | 3端口 | 无故障检测功能 | 消耗电流:0.22A | W4S1-03B |
 | 5端口 | 无故障检测功能 | 消耗电流:0.22A | W4S1-05B | |
| 有故障检测功能 | W4S1-05C | ||||
*1. 以往的第三种接地
注1. 并非绝对距离,不能用作测量仪。请与机器人校准配合使用。
*1. 以往的第三种接地
注. FH传感器控制器需要为Ver.5.32以上。
* 但取决于主站上限值。
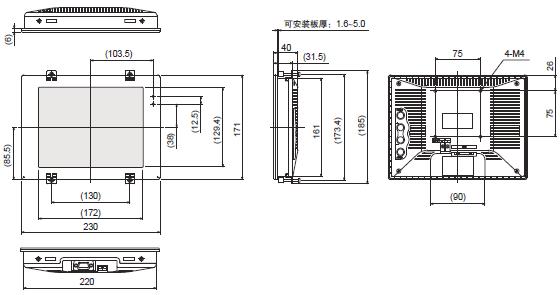
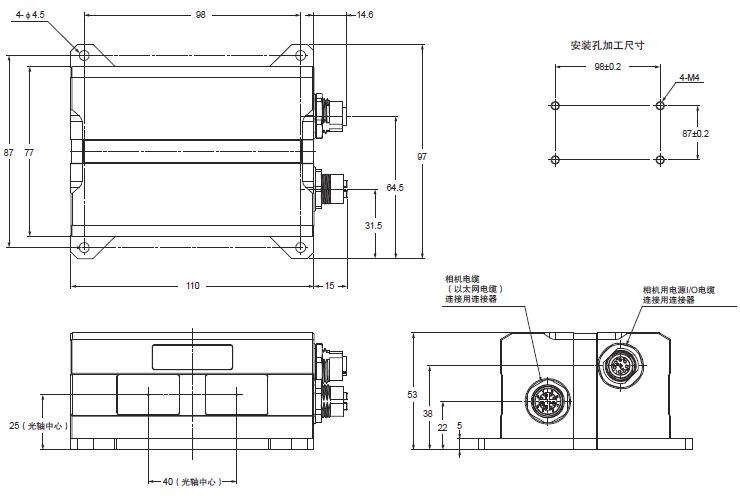
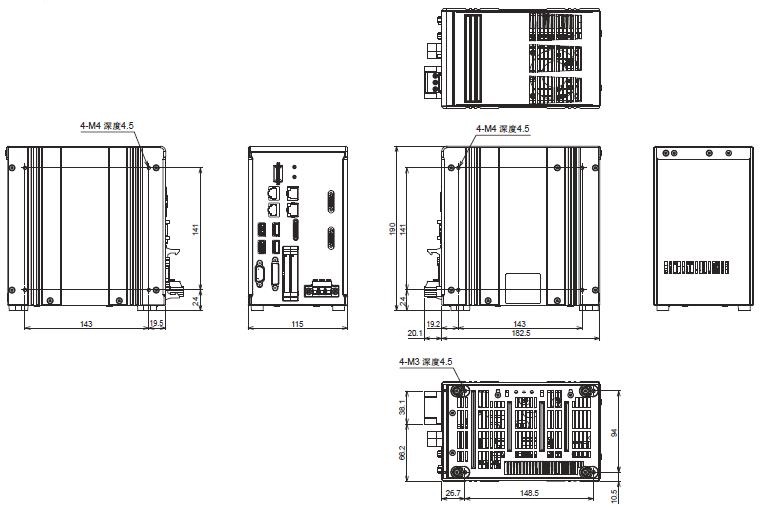
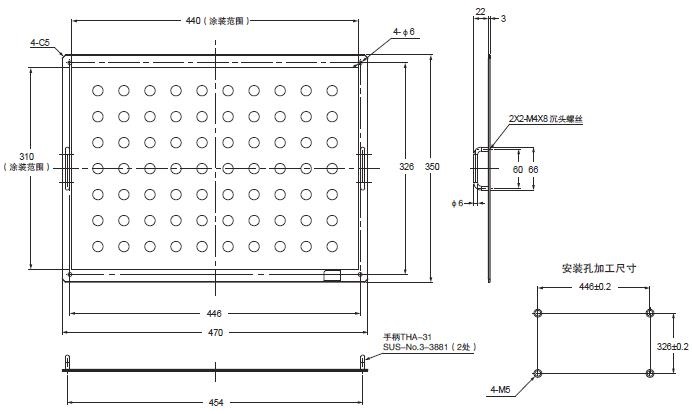
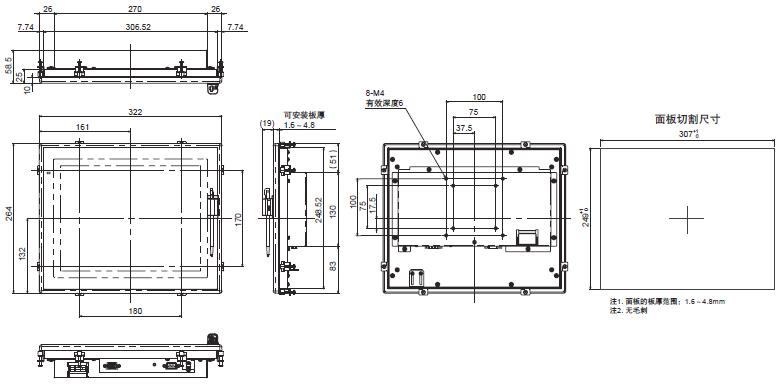
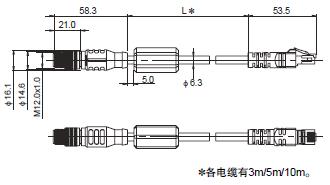
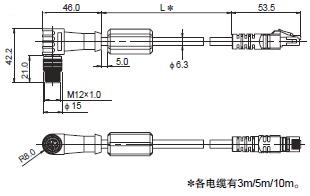
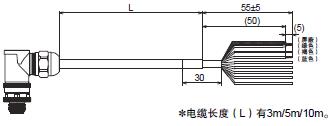
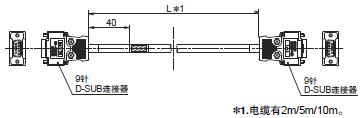
外形尺寸:
(单位:mm)
FH-SMDA-GS050B
FH-5050
FHV-VNBX □M
FHV-VNLBX □M
FH-VSDX-BX □M
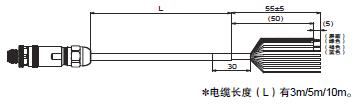
FH-VSDX-LBX □M
FH-XCAL-R
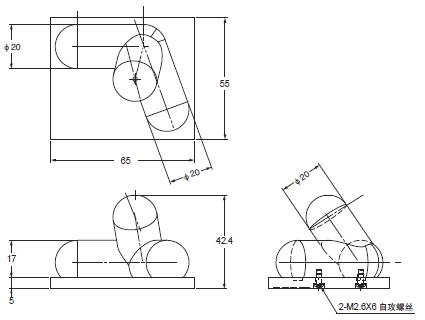
FH-XCAL-S
XW2Z-S013-□
FH-MT12
FH-VMDA

XW2Z-□□□PP-1
FH-VUAB
FZ-M08